サーボの実践トレーニング
2.機械の速度制御実験
ここでは、1項で培ったDCサーボモータを使用して、減速器、スクリュ-ナット機構を用いたスライダの速度を自動制御します(スライダの速度をサーボ化します)。ここも普段はモータメーカに委ねている場合が多いと見受けられる機能ですが、「自分ならどう制御するか?」を自問しながら実践しましょう。
まず、モータの回転軸からスライダの速度までをブロック線図化し、スライダの速度制御実験装置を擬似的に構築します。
以降は、この机上の(シミュレータ上の)スライダ速度制御実験装置に対して、疑似実験を重ね 実験結果を確認しながら、速度制御機能を構築していきます。
まず、速度をスライダ速度制御実験装置の物理特性に沿って、オープンループで可能な限り精度良く制御します。モータメーカに委ねると、このプロセスは抜け落ち易い(コントローラの汎用性重視の観点から割愛され易い)と思われます。そもそも本来、機械の物理特性を
最も理解している機械設計者やその傍らにいる制御設計者が構築すべき(構築するのが相応しい)機能です。ここの出来(追い込み方)如何で、速度制御性能(速度制御応答性と速度制御精度)は大きく違ってきます。
つぎに、速度(モータの回転速度)をフィードバックして(セミ)クローズドループで制御します。
この時 先の速度オープンループ制御部は、クローズドループ制御に対して フィードフォワード補償として機能します。
では順番に考えて行きましょう!
サーボの実践トレーニング 機械の速度制御実験装置
<2.1a スライダ速度オープンループ制御実験装置>
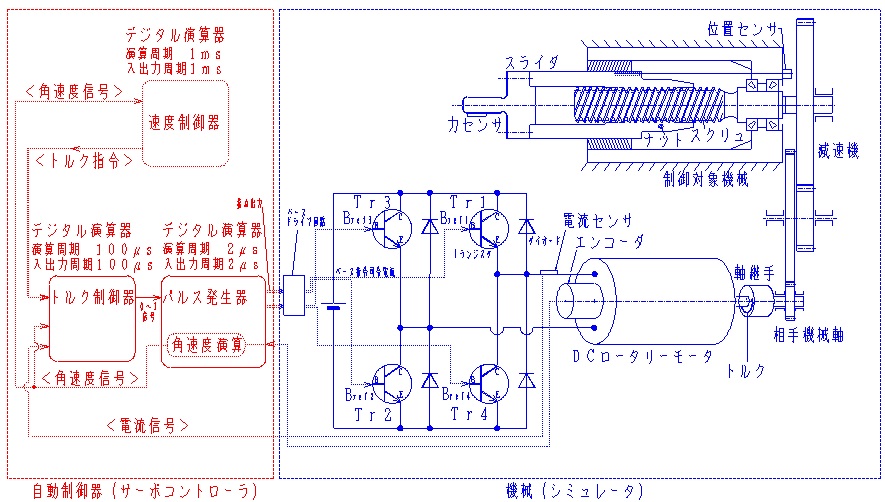
図2.1に、スライダ速度オープンループ制御実験装置を示します。
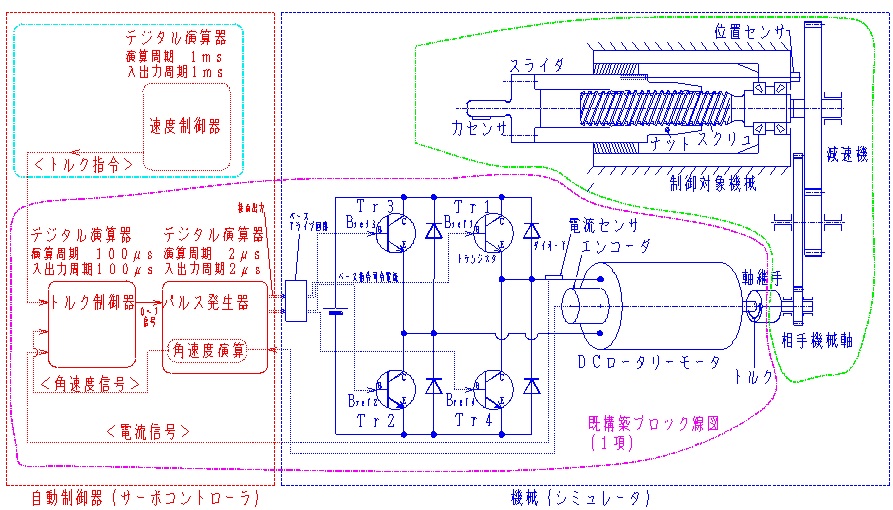
図2.1 スライダ速度オープンループ制御実験装置
図2.1には、1項で構築した(ブラシ付き)DCサーボモータ(桃色の2点鎖線で囲った部分) の回転軸にカップリングを介して減速器の入力軸を接続し、減速器の出力軸に(ボール式)スクリュを接続し、スクリュにはナットを噛合わせ、ナットに接続したスライダを水平(左・右)方向に動作可能にし、DCサーボモータのトルク制御器には その上位に位置する速度制御器から そこで演算したトルク指令を出力し、スライダを所定の速度で動作させる実験装置を示します。
スライダには、スライダの左右方向移動位置を検出する位置センサが装着されていますが、現段階では使用しません。
サーボモータ(回転軸)の角速度信号は、現段階では使用しないため、速度制御器に入力されていません。
速度制御器を構成するデジタル演算器は1ms間隔で数値演算することが可能で、演算結果(トルク指令信号)はデジタル信号のままトルク制御器に出力することが可能です。
図2.2には、スクリュ-ナット機構の詳細を記載します。
なお この実験装置の中で基幹要素であるスクリュの疲労強度(寿命)を向上させる対策を5点記載しています。スクリュ-ナット機構のスクリュは、負荷が繰り返し作用することにより特に疲労破損し易く、サーボの担い手(召使い)の筆頭が壊れ易いのでは、”サーボ”どころではなくなるため、その疲労(動的)強度を意識し確保することはサーボ化の大前提です。

図2.2 スクリュ-ナット機構の詳細
<スクリュの疲労強度(寿命)を向上させる対策>
スクリュの疲労強度(寿命)を向上させる対策を5点を説明します。
1.ネジの谷底Rはできるだけ大きくする
スクリュには、言わずと知れた軸方向に引張・圧縮力が作用します。
また、スクリュに作用する引張・圧縮力はネジ山を曲げ、ネジの谷には引張力に比例した曲げモーメントが発生します。
引張・圧縮力と、主にこの曲げモーメントによってネジの谷R部には、谷Rの大きさ(に関係する切り欠き作用)によって(Rが小さい程大きく)応力が集中します。
スクリュとナットでは、スクリュの断面積がナットのそれに対して(通常は設計上)圧倒的に小さくなり、引張・圧縮力を断面積で除した基本的な応力はスクリュが(ナット)より大きくなり、ネジ谷R部の応力の大きさはこれに比例するため、スクリュが(ナット)より疲労破損し易く、注意を要します。
したがって、ネジの谷底Rはできるだけ大きくすることは、基本的にスクリュの疲労破損を抑制するために重要です。
2.負荷側の噛み合い前のネジ部外径はインローで抑える
スクリュには、軸方向に作用する引張・圧縮力(A)以外に、スクリュ(の両端)を支える部材などの剛性変形に伴い、スクリュ軸そのものを曲げようとする曲げモーメントを発生させ、それが起因して、軸方向に大きな引張力Bを追加発生させます。
引張圧縮力Aと引張力Bが加算された引張・圧縮力Cが作用することになり、これが原因で短時間で疲労破損に至るケースもあります。引張力Bは機械設計時に想定し難く、想定外に大きい場合があり、特に注意を要します。
したがって、負荷側の噛み合い前のネジ部外径をインローで抑えることは、引張力Bの発生を抑制するために重要です。
3.負荷側のナット噛み合い開始部はテーパ状に不完全ネジ部を作る
スクリュ-ナットの噛み合いにおいて、スクリュ-ナットに作用する(引張または圧縮)荷重は、噛み合いの長さに比例した複数のネジ山に均等に(分散)作用しません。
物理的に(力学的に)噛み合いの負荷側-第1ネジ山が強く荷重を負担します(第1ネジ山、第2ネジ山、・・・・第〇ネジ山の順に、ネジ山が負荷側に近いほど、強く荷重を負担します)。 図2.4 参照
この特性を留意し、対処する必要があります。
負荷側のナット噛み合い開始部をテーパ状に不完全ネジ部を作ることは、第1ネジ山を最大として、第2、第3、・・・・第〇ネジ山の順に分散する、荷重勾配を弱める作用を発揮します。
4.ナットを袋状にしてナットの荷重伝達経路を負荷側から遠ざける
3項と同様に、ネジ噛み合いにおけるネジ山荷重分担の特性を背景として、ナットを袋状にしてナットの荷重伝達経路を負荷側から遠ざけることは、第1ネジ山を最大として、第2、第3、・・・・第〇ネジ山の順に分散する、荷重勾配を弱める作用を発揮します。
5.ナットの剛性(ヤング率や断面積)はできるだけ小さくする
ヤング率(縦弾性係数)は、鉄鋼材料なら21000kg/mm2ほど、鋳物(FCD)なら16500kg/mm2ほど、黄銅系の材料なら12000kg/mm2ほど、ヤング率が小さい材料を使用するほど、断面積が小さいほど、ナットの剛性が低下し生ます。
3項と同様に、ネジ噛み合いにおけるネジ山荷重分担の特性を背景として、ナットの剛性(ヤング率や断面積)をできるだけ小さくすることは、第1ネジ山を最大として、第2、第3、・・・・第〇ネジ山の順に分散する、荷重勾配を弱める作用を発揮します。
2~5の対策は、スクリュの疲労強度を向上させる対策ですが、いずれもナットの構造や形状、材質に関係しています。
これら(2~5)の対策を講じない場合は、図2.3に示すような(通常よく目にする)スクリュ-ナット機構になります。

図2.3 2~5の対策を講じなかった場合のスクリュ-ナット機構
2~5の対策を講じなかった場合と講じた場合の、スクリュが負担する荷重分布を図2.4に示します。

図2.4 2~5の対策を講じた場合と講じなかった場合のスクリュネジ山荷重分布
両者間には、スクリュ 負荷側から反負荷側に至る ネジ山が負担する荷重分布の勾配に差異が生じます。特に、スクリュ 負荷側の第1ネジ山が負担する荷重値に大きな差異を生じます。
スクリュナット機構において、荷重が繰り返し作用することに伴う疲労破損は、その殆どがスクリュ負荷側の噛み合い第1谷部から生じます。
サーボの期間要素であるスクリュの疲労破損を予防する対策を、設計にきちんと反映させる必要があります。
<スライダ機構の各構成要素の物理量>
スライダ速度オープンループ制御実験装置の、(図2.1で黄緑色の2点鎖線で囲った)スライダ機構 各構成要素の物理量は表2.1に示します。
表2.1 スライダ速度オープンループ制御実験装置-スライダ機構 各構成要素の物理量
| 要素 | パラメータ | 物理量 |
*****
機械(シミュレータ)
***** | | |
| 減速器 | | |
減速器の慣性モーメント(入力軸換算)
(スクリュ分も含む) | Jr | 0.015(kgms2) |
減速器の粘性抵抗係数(入力軸換算)
(スクリュ分も含む) | Dr | 0.1Nms/rad |
減速器の摩擦トルク(入力軸換算)
(スクリュ分も含む) | fr | 8Nm |
| 減速器の減速比 | Gr | 6 |
*****
スクリューナットのネジ部
***** | | |
| リード量 | Lsn | 30(mm) |
| 有効径 | dρ | 70(mm) |
| 座面外径 | do | 90(mm) |
| 座面内径 | di | 65(mm) |
| ネジ面摩擦係数 | μs | 0.008 |
| 座面摩擦係数 | μw | 0.01 |
| ネジ山半角 | α | 15(deg) |
*****
スライダ
***** | | |
| スクリュ(軸方向)剛性 | Ksn | 1367(kN/mm) |
スライダ質量
(ナット分も含む) | Mn | 500(kg) |
スライダ粘性抵抗係数
(ナット分も含む) | Dn | 0.2(kNs/mm) |
スライダ摩擦力
(ナット分も含む) | fn | 5(kN) |
図2.5には、表2.1示した減速器慣性モーメントの範疇、スライダ質量の範疇を明確に示すため、それらをそれぞれ赤色、青色で示します。

図2.5 減速器慣性モーメント および スライダ質量の範疇
それでは、図2.1, 図2.3, 図2.5 および 表2.1に基づいて、速度オープンループ制御実験装置のブロック線図を描いてみてください。
具体的には 図2.1の、既に描写済みの桃色の2点鎖線で囲ったサーボモータのブロック線図に加えて、緑色の2点鎖線で囲ったスライダ駆動機構のブロック線図と、空色の2点鎖線で囲った速度制御器のブロック線図を追加で描いてみてください。
1項で述べた通り これらのブロック線図は、速度制御器のソフトウェアを実装したり、スライダを動作させたりする(計算方法や計算ソフトには依存しない万国 万人に共通の)設計図になります。
サーボの実践トレーニング最初に戻る場合は
ここをクリックしてください!
サーボの習得と実践に戻る場合は
ここをクリックしてください!
| 内容 | サーボの実践トレーニング
機械の速度制御 |
| Eメール | hydro-servo-k@ab.auone-net.jp |
| 作者 | サーボバカセ |
| 更新日 | 2023年 12月30日 |