抵抗-インダクタンス回路を例にとります(図111)。
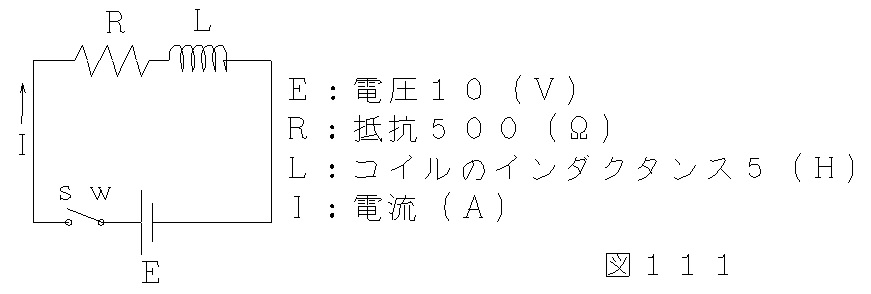

スイッチをONさせると、電流が流れます。このことに関して微分方程式を立てます(式111)。


入力を電圧E、出力を電流Iとして、式111をIに関して時系列で最も先行するIの微分値dI/dtで整理します(式112)。

式111をブロック線図で示します。そのまま置き換えるだけです(図112)。

なお、dI/dtを積分するとIになります。このことをブロック線図で示します(図113)。
ここで時間積分は、ラプラス演算子Sの逆数1/Sで表示します。

図112と図113を組み合わせると、ブロック線図が完成します(図114)。

図114を伝達関数で表現します。そのまま変換するだけです(式113)。

式113をIに関してE/Rを使用して整理し、変換します(式114)。

式114において、右辺の左側E/Rは静特性、右側の点線で囲った部分は動特性を示します。
式114の右辺の動特性に関して、L/RをTとし、式114を置き換えます(式115)。
に変換.jpg)
式115において、右辺の右側の点線で囲った部分は、時定数をT(s)とした1次遅れ要素です。
なお この1次遅れ要素は、ローパスフィルターとしても使用されます。この作用に関しては次項(動特性が有す周波数特性)で説明します。
1次遅れ要素の時定数Tを式116に示します。時定数Tが意味する特性、応用途は次項で説明します。

式115右辺の右側1次遅れ要素をローパスフィルターとした場合のカットオフ周波数fを式117に示します。カットオフ周波数fが意味する特性、応用途は次項で説明します。

改めて、動特性であるローパスフィルターの伝達関数だけを取り出して、入力Xからローパスフィルタ-を介して出力Yを応答させます(図115)。

これを数式に分解します(式118)。

出力Yに関して、時系列で最も先行する(Yの微分)YSで整理します。(式119)。

式119の下側の式から、ローパスフィルターのブロック線図を描きます(図116)。この形は、具体的にローパスフィルターを計算する(プログラム言語で記述する)場合に適用できます。
