もう1つの方法として、2次の逆特性要素を用いてみます。フィードバック比例補償の比例定数Kを大きくすると、応答が早まりますが、不安定になります。今、比例定数をKを大きくし、敢えて不安定化させた状態で、2次の逆特性補償(要素)を、位置指令XREFと位置フィードバック制御系の間に効かせてみます。このことを図50に示します。
機械系と位置フィードバック比例制御からなる位置フィードバック制御系(本例)は、B=K・g/M,L=g・C/Mとすると、固有周波数ω2=√B=179.9rad/s、減衰比ζ2=L/(2・ω2)=0.27の2次遅れ要素B/(S2+LS+B)になります。一方で、位置Xを理想的に応答させたい2次遅れ要素は、固有周波数をωId=400rad/s、減衰比をζId=0.85とし、A=ωId2、P=2ζIdωIdとすると、A/(S2+PS+A)になります。理想的な2次遅れ要素を位置フィードバック制御系の2次遅れ要素で除したものが2逆特性要素です。
![図50 [位置制御・比例(P)補償]×2次の逆特性補償 ブロック線図](images/図50 [位置制御・比例(P)補償]×2次の逆特性補償 ブロック線図.jpg)

2次の逆特性要素の分子;2次進み要素(S2+LS+B)/Bは、角周波数ω2(1/T2)rad/sで位相が90度進み、ゲインは減衰比ζ2にも因りますがその辺りから角周波数が10倍する毎に100倍の割合で増加します。反対に、分母;2次遅れ要素A/(S2+PS+A)は、角周波数ωId(1/TId)rad/sで位相が90度遅れ、ゲインは減衰比ζIdにも因りますがその辺りから角周波数が10倍する毎に1/100倍の割合で減少します。2次の逆特性要素はこれらを乗じたものです。ω2<ωIdなら位相が進み、 ω2>ωIdなら位相が遅れます。教科書には記載されておらず、私(サーボバカセ)はそう(2次の逆特性要素と)呼んでいますが、2次の位相補償要素とも解釈できます。デジタル演算が可能であり、制御補償要素として把握しておくと便利でしょう。本例では、約285rad/sで82度進む2次の位相進み補償要素になります。このことを図51に示します。

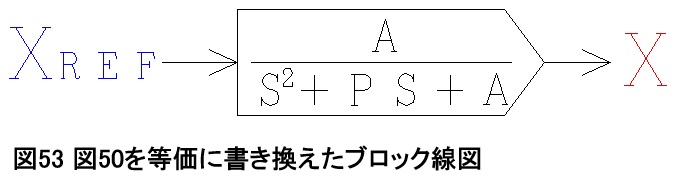
なお、図50は位置フィードバック制御系は、図52に示すように、2次遅れ要素に変換した形に書き換えることができます。

このように表現すると、位置フィードバック制御系の2次遅れ要素と2次の逆特性要素の2次進み要素が相殺し合うことが分かります。結局、図50は、位置フィードバック系がより早い固有周波数ωId、より安定した(減衰性の強い)減衰比ζIdの2次遅れ要素に置き換わったことになります。
位置のステップ応答結果を図54に示します。

このように、不安定な位置フィードバック制御系そのものを1つの特性(本例では2次遅れ要素)として捉え、その逆特性に相当する2次の逆特性要素を用いて、安定かつ高応答な特性に変化させることもできます。
大事なことは、例えば本例のような位置フィードバック系の場合、位置フィードバックループの内側の狭い部分だけを考えるのではなく、系全体がどのような特性を有すのか、視野を広げて考察することです。
本例の場合は、位置フィードバック制御系が純粋な2次遅れ要素であるため、効果が得られますが、実際にはより高次要素が含まれるため、注意が必要です。制御に支配的な特性が2次遅れ要素なら効果的です。
また、今回の制御方法はフィードフォワード補償の1種とも考えられるので、さらにフィードバックも併用すると、特性(位置フィードバック制御系)の変化に対しても、より制御の頑強さが増します。