積分補償の比例定数Kiを大きくし、積分(I)補償の作用を強めると、定常偏差を0にする最初の時間は早まるものの、定常偏差が不安定に上下します。これは何故でしょうか?
図18に示すように、PI補償を講じた位置制御系の位置指令XREFから位置Xに至る一巡ループを考えてみます。
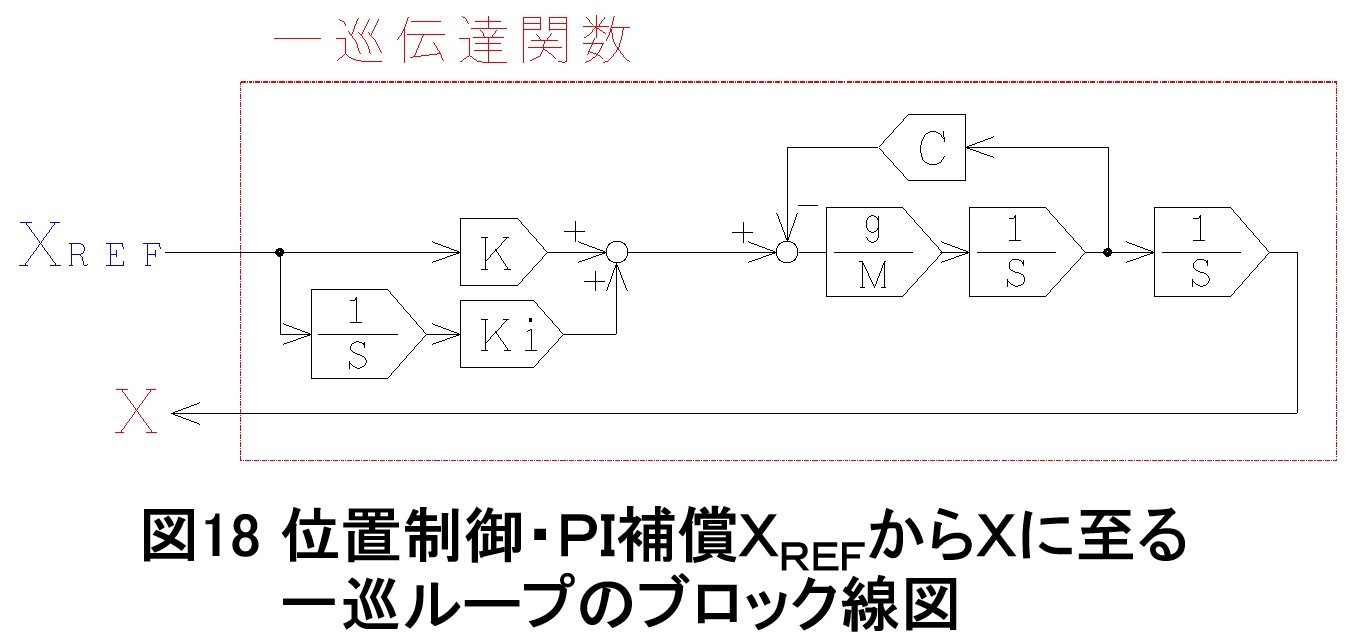

図19には、図18に示した一巡ループの周波数特性を示します。

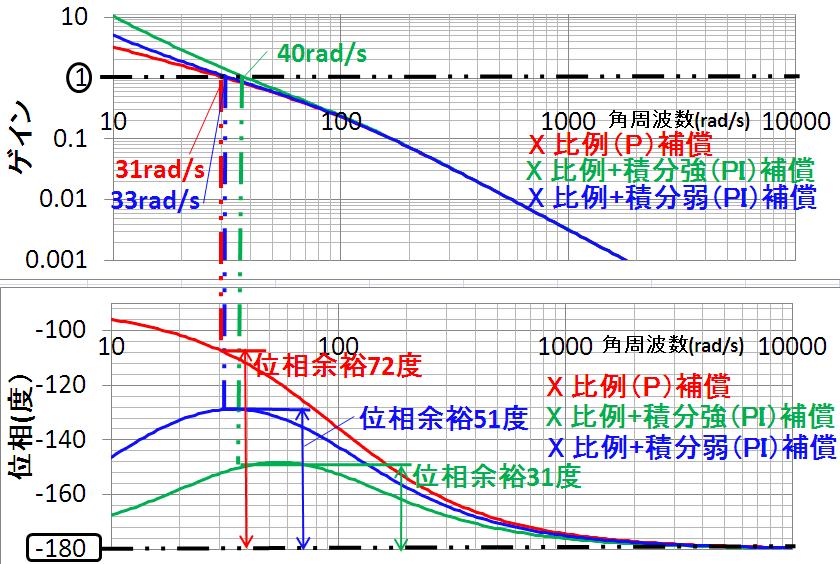
図19に示されるように、積分(I)補償の作用を強めると積分要素の位相が90度遅れる特徴が低周波領域を中心に強く現れるため、XREFからXに至る一巡ループの位相余裕が減少します。位相余裕が安定の目安である60度を下回れば、その程度にしたがって不安定化するためです。本例の場合、積分補償弱では位相余裕が51度あるため、ほぼ安定に定常偏差が0に整定しています。積分補償強では位相余裕が31度しかないため、定常偏差が不安定に上下しながら最終的に0に整定しています。この副作用には注意が必要です。
PI補償を適用すると、精度は得られるものの時間を要します。制御系を不安定にする副作用も伴います。
“サーボは召使いの如し”を理想とすれば、仕事が遅い召使いは召使いとして不合格であり、その要因である積分補償に、私(サーボバカセ)は多くを依存していません。位置制御性の高精度化には使用することがありますが、あくまでも他の補償要素と併用し、限定的な最低限の使用に留めています。例えば、先ず外乱である荷重fを推定し相殺する補償器を考えます。