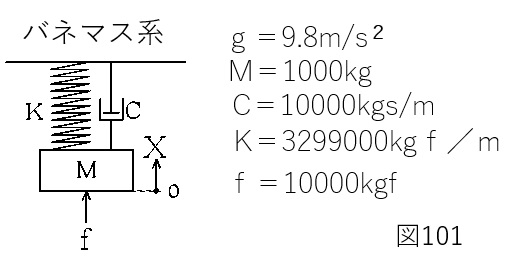

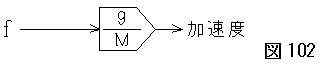
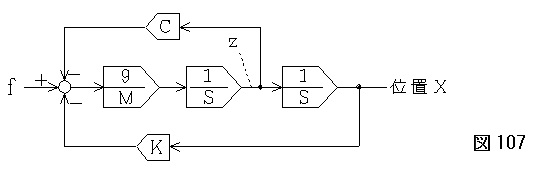
まず質量Mに力fが作用すると、加速度が発生します。

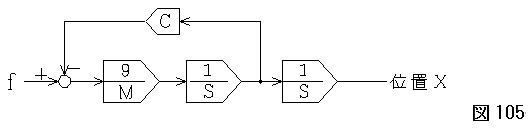
次に加速度を一度時間積分すると、速度が発生します。
ここで時間積分は、ラプラス演算子Sの逆数1/Sで表示します。

さらに速度を一度時間積分すると、位置が発生します。

なお、発生した速度に対してそれを妨げる方向に粘性に比例した抵抗力が作用します。
この形態は運動系の基本的な性質です。覚えておいて、さらには慣れて体感できるようにしてください。
運動系の安定化作用、さらには制御系の安定化作用に関連しています。
また、発生した位置に対してそれを妨げる方向に位置に比例した抵抗力が作用します。
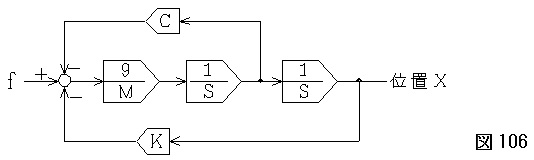
これで、バネマス系のブロックは完成です。
バネマス系のブロックに限らず、いかなる機械系のブロック線図もこのようにして作成できます。
次に、このブロック線図から、Xからfに至る伝達関数を求めます。
便宜上、速度をzとしますと、<101>、<102> 2つの方程式が成立します。


<101>、<102>から伝達関数<103>式が導けます。

<103>式右辺の分母分子を質量Mで除し、さらに分子にKを乗し、その分全体を1/Kにし伝達関数<104>式を導きます。

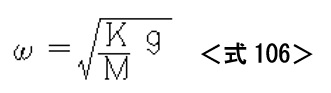
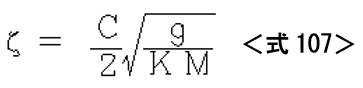
<104>式右辺の右側部分のKg/Mをωの2乗、Cg/Mを2・ζ・ωに置き換え、伝達関数<105>式を導きます。

<105>式右辺の左側部分はバネ定数K、右側部分は角固有周波数ω(rad/s),減衰比ζの2次遅れ要素(無次元)を示します。
つまり、<105>式右辺の左側部分は静特性、右側部分は動特性を示します。
<106>式、<107>式より、この(図101に示した)バネマス系の固有振動数は179.86rad/s、減衰比は0.27です。
静特性であるバネ定数の特性は、恐らく周知のことと存じます。
動特性である2次遅れ要素の特性が有す周波数特性は、”系の時間応答、系の動特性が有す周波数特性の確認方法”で説明します。