微分補償は比較的大きな外乱(荷重)が作用する機械制御を対象とした場合、使い道が無いのか?そんなことはありません。仕事が早いのですから、暴走しないように、適所に限定使用すれば威力を発揮します。
PID位置制御系に力を急激に(ステップ状に)作用させた場合(図23)に対応する各制御操作量の時間応答を、図28に示します。
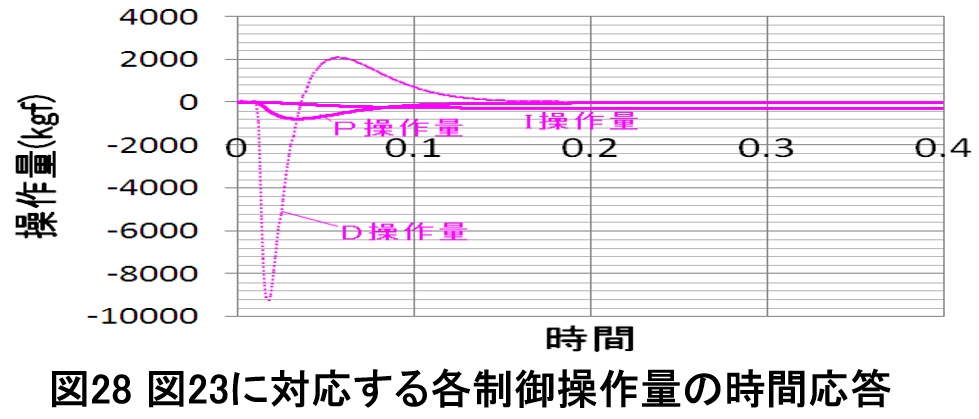

微分(D)操作量は、荷重Fが作用した時点で先ず、荷重fを妨げる方向に反応しています。次に、荷重fと同じ方向に変化しています。
この特性を把握して、微分操作量の最低値を保持し、以降はこれをフィードフォワード量として使用します。そうした場合の位置制御・PID補償 ブロック線図を図29に示します。


図30に、 図28に対して微分操作量の最低値を保持した場合の、各制御操作量の時間応答を示します。
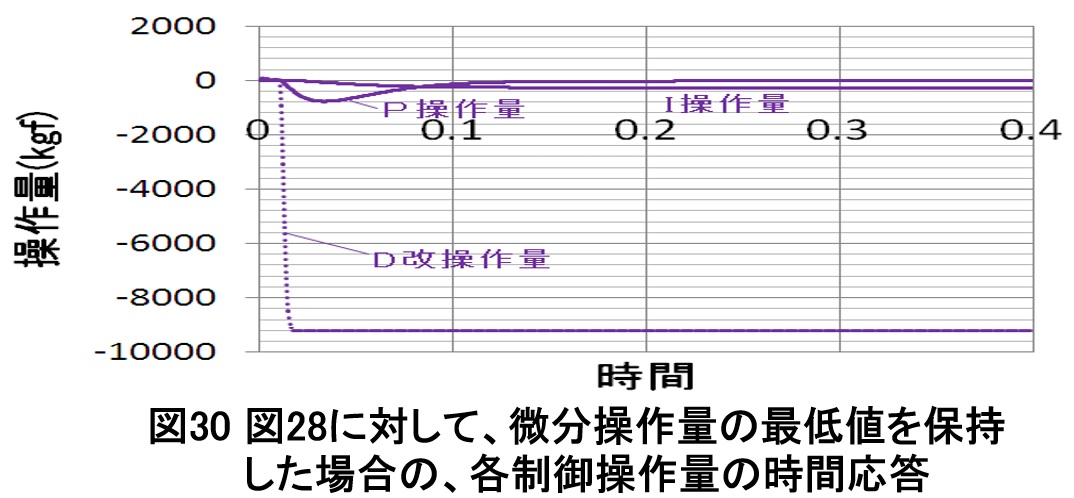
結局、外乱fを早期に把握し、外乱相殺用にフィードフォワード量として使用した効果が得られ、積分による(整定化)業務も軽減させ、図31に示すように応答性、精度共に向上します。

しかし、実際にこうする(このように微分補償を生かす)ためには、